

时间: 2024-06-02 16:19:52 | 作者: MPV
刷短视频刷到生理不适、且对新能源和车圈有兴趣、愿意静下来读一点长文章的人。
举个例子。比亚迪在今年发布了高端品牌——仰望,旗下U8车型在发布会开场像螃蟹一样地横向移动到舞台中央,并原地旋转一圈,这个炸裂的表现引发了大量关注和讨论,这个开场也让比亚迪品牌朝着“酷炫高端大气”踏上坚实的一步,在众多人心目中也变成既好又好的首选。但是,不同于绝大部分汽车使用转向系统来掉头,其实U8的表现是巧妙地使用了一种特殊的轮胎来实现,但这种轮胎因为没有办法高速使用,并且磨损极大而无法在乘用车领域量产。
汽车像螃蟹一样走路,炫酷,可以,但没必要。真实的情况还得靠我们方向盘+转向系统来操作。
汽车转向系统就应该按照驾驶员的意愿控制汽车行驶方向的执行系统。如果把整台车看作人的身体,那转向系统就是汽车的腰腹核心,它的好坏直接决定了你驾驶日常的舒适度和在做复杂运动时的表现。比如《头文字D》里有这么经典的一幕:藤原拓海利用排水渠过弯技惊四座,除了要用极高的速度入弯,另一个关键就是精准的转向,差一点就会车毁人亡。
一个现代转向系统的示意图大致如下,如果被各种词汇和结构弄得晕头转向也没关系,你能想象一下,你小时候是不是喜欢骑到爸爸脖子上,当你转动爸爸的头(图上的方向盘),他的脖子(转矩传感器)感受到你的力量发送到他的大脑(ECU),知道你要左拐去游乐场,大脑发送信号给腰腹肌肉(电动机)扭胯(转向器)带动双腿(轮胎)进行左拐,行云流水地完成这套动作。
不过上图的这套系统也经历了超过百年的历程,包含数次迭代和更新才变成这样。到了新能源车时代,转向系统正朝着更智能、更电气化的方向飞速狂奔。但不管它怎么变,其发展核心的脉络就是让车变得更“大众”,让人开车更轻松,最好人人都能弯道超车、排水沟过弯。我们大家可以把它的历史大致分为以下几段:
19世纪末到20世纪初,纯机械的转向系统,开车最为费劲,转向全靠臂力硬掰,司机必须是“大力水手”;
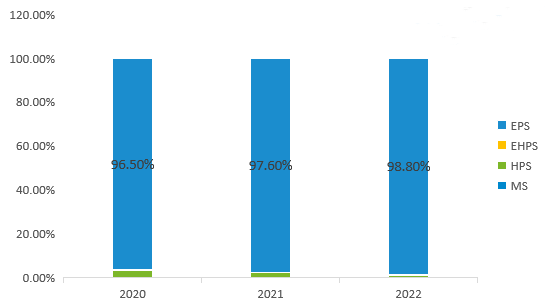
20世纪50年代,在机械系统之外额外加上了通过液体压力来提供助力的装置,简称液压助力转向系统 HPS(Hydraulic Power Steering),这样一个时间段转向其实是靠臂力,助力只是辅助;
20世纪90年代至今,进化出使用电机来提供助力的转向系统,简称电子转向系统 EPS(Electrical Power Steering),此时转向力主要由电机提供,人力主要提供意图,人人可以开车。同时,还出现了后轮转向来辅助让大车的转向更简单;
新能源车时代,电气化、智能化技术快速进步,转向系统在进一步实现冗余的基础上,慢慢具备主动控制,并逐步替换掉剩余的机械连接,往纯线控转向SbW(Steering by Wire)发展。从发动机向电机的变化让轮边电机的方案成为可能,这样的形式也让汽车原地掉头变成现实。
转向系统是司机和车的最直接交流,但是在汽车问世之初,这种交流既不亲切、也不友好,甚至能够说是蛮力相向、需要“大打出手”。
1886年,戴姆勒基于马车开发出第一台汽车,其转向系统也沿用了传统马车的转向结构,但它的问题是车轮与转向传动机构之间的机械连接特别长,导致驾驶者转向时非常费力且难以控制。以下图为例:两个成年男性150kg,当时的汽车250kg,橡胶轮胎的动摩擦因数为0.3,假设齿轮传动比5比1,大致推算转向力需要24kg,所以当时的驾驶员基本都是成年男性,而且这车操作困难容易翻车,开车也非常容易受伤。
为了解决这一个问题,1889年,威廉·迈巴赫,也就是我们熟知的迈巴赫汽车的创始人,通过一种特殊的机械设计降低了转向力,这个设计被奔驰在1893年首次应用在量产的维多利亚车型上进行推广。虽然这种设计改善了转向能力,但是仍需要用蛮力转向,每次开车都等于在健身房做力量训练。在此阶段女性和大部分男性无法驾驶仍然是因为臂力不够。
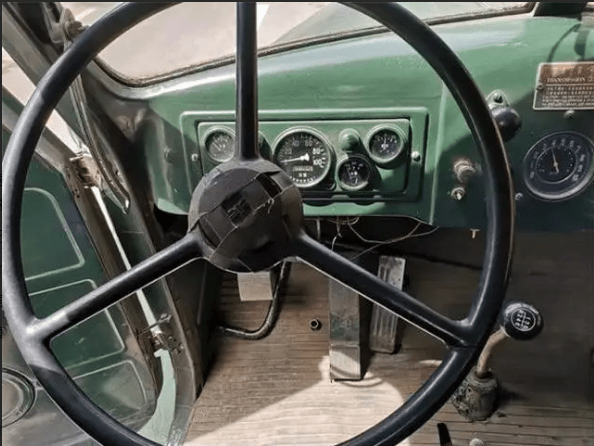
在20世纪40年代,乘用车在干燥水泥路上需要的方向盘转向力仍达8公斤之大,这无疑进一步提升了驾驶的门槛。它大致等同于现在去开一个老式的大货车,以前的货车司机可都是彪形大汉。而现代转向的设计理念是驾驶员施加在转向盘上的作用力不超过3公斤,即一个普通的成年女性也可以轻松驾驶。
转向助力随之应运而生。克莱斯勒是第一个采用助力转向系统的车企,这套助力转向系统是基于1926年Francis·W.Davis的发明专利开发的,但却首次应用在1951年的克莱斯勒的New Yorker车型上,前后相隔25年之久——是的你没看错,这么一个创意设计落地人类花了25年。而在这么长的时间里,人类都在用“大力水手”的模式开车。
Davis的转向传动是一套液压-机械活塞的反馈控制,简单来说就是转动方向盘,一方面会转动里面的机械装置,另一方面还会挤压一个密闭活塞里的液体,液体被挤压后压力增大,然后把压力输出到转向器上形成助力,这样驾驶者就能节约很多力气来控制方向盘了。
1926年10月,Davis向美国通用汽车、克莱斯勒汽车及配件商Gemmer等厂商展示了液压助力转向系统,所有人对这套系统表现的性能都很兴奋,它不仅仅提供了助力,而且实际装车后发现操控感很强,并且转向时不可能会出现机械式的摇摆或晃动问题,这也逐步降低了操作难度。在各家哄抢之下,最终,当时的美国汽车巨头通用获得了与Davis合作的机会。
但这套机械液压助力转向系统的上车之路十分坎坷。在经历了漫长的开发-测试-验证后,1933年,这套系统准备首次量产应用在通用汽车的凯迪拉克品牌上。但由于碰到美国经济大萧条,通用汽车产量缩减到15000台/年,而应用液压助力转向系统又会增加额外不少成本,所以通用搁置了这一个项目。这一搁置就是20多年,直到1951年,克莱斯勒再次将液压助力转向的车型推向市场,但由于此时Davis的专利保护期满了,Gemmer公司也能够给大家提供类似产品,并通过更好的价格与更优的工程化赢得此单。
这是助力转向系统零的突破,接下来的两年里,HPS从零快速攀升到100万套/年,到1956年,近1/4的美国销售的车辆装备HPS,其中Gemmer公司是行业领头羊。
同时,Gemmer公司开始海外扩张,在1953年与德国采埃孚ZF合作,并开始在德国生产销售,这又打开了另外一个潘多拉的盒子。
到这里,HPS慢慢的开始让转向挣脱人力大小的束缚,解放了更多不健身的老司机和女性,但任旧存在问题:
二、因为低速的摩擦系数高,汽车在低速转向时仍需要驾驶员对方向盘施加接近10公斤力才能使汽车转动,在侧方位停车等日常的低速驾驶中依然有大卡车的驾驶感。
市场在召唤。于是,大约1970年代慢慢的出现使用电机来进行助力的转向系统研发。
最开始很自然的想法是电机能提供更大的扭矩,那么直接在HPS上加一个电机就行了,电子液压转向系统EHPS(Electrical Hydraulic Power Steering)应运而生,但很快由于可靠性和成本的原因“昙花一现式”地淡出了历史舞台。
1988年,电子助力转向系统EPS首次应用在日本铃木Suzuki Servo紧凑车型上,这个车型的整体质量轻,其电动转向的电机功率只有240W,但整体的技术栈已经完备:驾驶者输入至方向盘的力矩被力矩传感器监测到,然后控制器计算出要输入的助力并驱动电机,电机动力传递至转向系统,这跟我们前面提到的“转爸爸头”的自然模型已经很接近了。这项专利的另一个显著特点是车辆的行驶速度也被考虑并输入至控制单元,这使得可以依据驾驶条件调校转向手感。
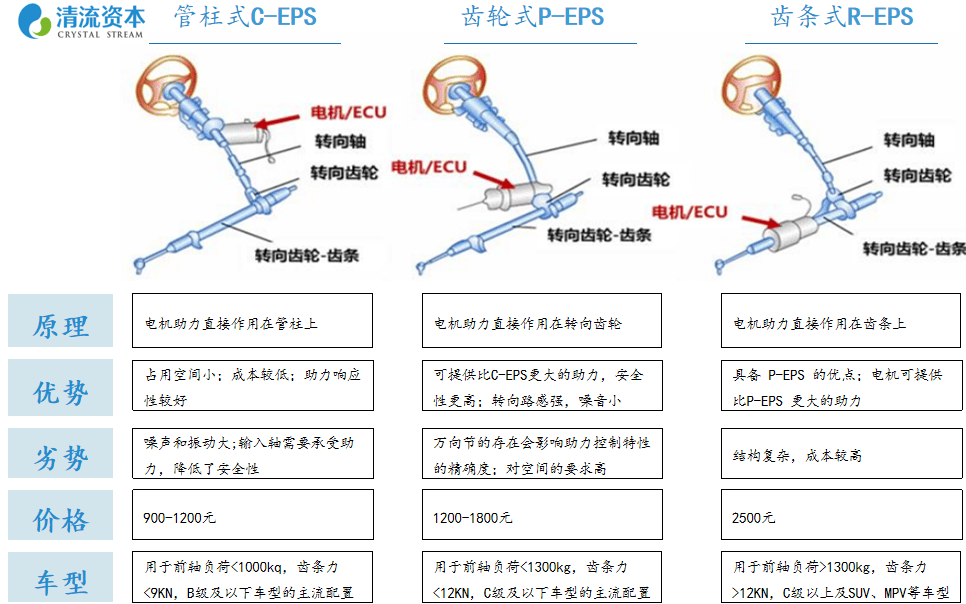
这个技术框架延续到了现代EPS,变化的是电机的功率、控制器的计算能力及电机布置的位置,具体分为:电机助力直接作用在管柱上的C-EPS、电机助力直接作用在转向齿轮P-EPS、电机助力直接作用在齿条上R-EPS。这三种不一样的EPS都存在在现代的汽车里面,可以去找找你的爱车手册,看看你车里的EPS是哪一种。
EPS慢慢的变成为现代汽车的标配,转向力可以被轻易控制到很低,到这样一个时间段几乎已无人再讨论乘用车需要的转向力太大而让人开车费劲了。但又迎来另一个问题,车慢慢的变大,特别是电动车,中国用户觉得车是家的移动第二空间,普遍喜欢大车,所以转向和掉头需要的道路空间也非常大。但随着城市里车慢慢的变多,特别在一些老城区,道路十分拥挤,给的空间又不太够,矛盾就变得很突出了。
现代乘用车转向通常都布置在前轮,大家对后轮转向相对陌生,当下由于新能源汽车的渗透提升,后轮转向也开始从幕后走向前台。它作为前轮转向的补充,原多用于大型豪华轿车和SUV上,例如,宝马5/7系、奥迪Q7/8都可以选装后轮转向,而小鹏X9在宣传时就号称是“全球唯一标配后轮转向的MPV”,其实不止小鹏,新势力里面问界M9、智己L7等都可以搭载后轮转向。
为什么电动车会慢慢的多采用后轮转向呢?一种原因是纯电平台的电动车须把电池放在前后轴之间,普遍轴距较长,而轴距长会增加转弯半径,而后轮转向技术能够有效提升灵活性;另一方面后轮转向技术是基于电气操作,在纯电平台上更容易实现。
后轮转向角度通常在2-5°之间,虽然不大,但可以“四两拨千斤”:当我们应该车辆进行转弯的时候,前轮随着方向盘转动,后轮则会自动朝着相反的方向调整微小的几度,最终带来的结果是车辆快速朝着目标方向转动,转弯半径大幅减少。
比如大众途锐(C级大型SUV,与Q7/X5同级别,车长4878mm),在后轮转向介入之后,车辆的转弯半径从6.09米减少到5.59米,接近大众高尔夫6(A级车,车长4199mm)的5.45m。
这也是为什么小鹏X9选择标配后轮转向并且大力宣传,毕竟对于一台车长4891mm轴距接近3米的车来说,没有后轮转向确实驾驶的难度会提高。后轮转向的普及也符合转向系统降低驾驶的门槛,让车变得更符合“大众”的发展脉络。
随着新能源车的发展和渗透,同时进一步朝着无人驾驶迈进,转向系统准备进入”主动控制“时代了。线控转向SbW被认为是未来的理想方案。SbW是全动力转向,不单单是提供额外的力量来减轻驾驶员的操作力量,更重要的是它可以在一定程度上完成对车辆转向的全面控制,是实现无人驾驶必不可少的执行器件,是特斯拉无方向盘座舱方案的基础,是真正解放司机的终极方案。
线控转向系统取消了传统转向系统中方向盘与转向执行器间的机械连接,要由两个电机、控制器及相关传感器等部分所组成,和EPS系统的直观差异为取消了方向盘与齿轮齿条转向的机械连接,完全使用电信号进行控制:
国外主机厂和零部件厂商在SbW早有布局,日本走在前列:英菲尼迪在2014年的Q50就首次量产了线控转向,但他采用了双系统,仍然保留了机械结构做冗余备份。但他在市场也没有完成很好的示范表现和推广,一是因为整车变更重了,二是后来因为控制单元有可能对方向盘角度作出误判的事故而发生了召回。
丰田的bZ4X在2022年也搭载了线控转向系统,方向盘在只有正负150度的转向幅度下,车辆能完成包括左右转、掉头、入库、绕桩、麋鹿测试在内的各种复杂测试动作,甚至是空旷场地比较激烈的驾驶动作。国内当前绝大部分线控转向产品仍处于研发或小批量应用阶段,为高阶无人驾驶汽车的落地做技术储备。
政策端也在逐步开放,2022年1月1日,汽车转向系统新国标正式实施,取代已经执行超过20年的GB 17675-1999。新国标的重要变化将解除以往对转向系统方向盘和车轮物理解耦的限制,意味着线控转向可以逐步落地。但目前由于法规细则以及测试标准等细节还没明确,估计离量产落地还有3-5年。在过渡期内要满足L2+、L3级别辅助驾驶的要求,即电动助力转向系统EPS在发生单点失效的情况下,依然具备一定的助力能力,冗余EPS将成为这阶段智能驾驶系统的关键性零部件。
电机取代发动机后,电机可以分布式驱动未来也会对汽车的转向能力产生一定的影响。比如比亚迪仰望U8在后续使用普通轮胎也可以保留原地掉头的功能:实现它的基础是左右两侧车轮的反向转动,通过在车辆左右两侧车轮施加方向相反的驱动力矩,轮胎会突破路面附着极限进行转动,使车辆产生绕质心的转动,进而实现车辆原地转向动作。
它通过四个独立驱动的电机将动力直接在轮边释放,然后基于四电机矢量控制精准地控制车身姿态,不过U8依然需要R-EPS来执行日常的非180度掉头的转向场景,当然分布式驱动的方案并不是比亚迪的专属,Rivian和奔驰EQG也都发布过类似的功能。
转向系统是驾驶员与车辆之间最直接的交流。我们都有这样的经验:在买车试车、或者去试开朋友新车之后,通常第一句话就是,我喜欢/不喜欢这车的转向,而销售或者你朋友会回怼一句——这车转向手感很棒啊!这个分歧是没法调和的,因每个人对转向都有自己的主观感受,主机厂验收汽车转向的时候,主观评价也是很重要的一个环节,作为一篇(假装)“严谨”的科普文章,我们从驾驶员的角度来”科(Zhuang)学(Bi)“地拆解一下如何评价一台车的转向。
中心区的定义为:方向盘转动正负3°,此时的工况为车速高、方向盘输入小,直线g 。我们日常的城区驾驶95%的情况方向盘都是处于中心区,如果方向盘在中心区域能自己保持一个稳定的状态,它将非常大程度上减轻了司机的精力,同时还能保持车辆在一条直线上。其最重要的两个指标:
(1)Torque Deadband力矩死区,理想状态是随着车速增加死区应减少;
(2)Yaw Deadband横摆死区,理想状态是随车速增加不要快速改变。
一个最根本原则就是:Torque Deadband小于Yaw Deadband,作为驾驶感受那就像“开在一个槽里”,当转向过了中心区,方向盘先变重,然后车辆才出现横摆,如果反了,那这个车辆转向系统一定不是一个优秀的设计。
方向盘转动大于3°,车速有低有高,方向盘输入大,场景包括高速弯道、突发情况避障等极限工况,侧向加速大于0.3g。其最核心的指标是偏航率增(Yaw-Rate),即随着方向盘的大幅转动,体现在方向盘上的力矩是否线性增加。
停车场景是车速低,方向盘输入大。此阶段评价的内容大多分布在在低速大转角的范围以内。所以基本上集中于方向盘本身的感受之上,对于车辆的Yaw的关注并不多,主要关注方向盘输入的左右对称性,回正的性能以及平滑性。
当然主机厂会有更多的指标和测试来综合评价转向,但大致的场景和分类就包含这三方面。希望当下次你跟朋友一起去试驾的时候,除了评价这车转向手感不错,还可以用如下形容词说这车:开起来没有“槽感”、偏航率增不够线性、左右输入不太对称和丝滑......朋友一定会给你竖起大拇指,夸你是个老司机!
声明:本文由入驻搜狐公众平台的作者撰写,除搜狐官方账号外,观点仅代表作者本人,不代表搜狐立场。













微信公众号


