

时间: 2024-06-11 19:04:16 | 作者: MPV
控制中,很常见的是利用纵向控制产生横摆力矩来提高车辆的稳定性,称为直接横摆力矩控制。直接横摆力矩控制常常是以牺牲车辆的部分制动性能为代价,而采用主动转向控制来实现车辆稳定性控制却可以在不影响制动的情况下达到同样的效果,并且其所需要的轮胎力只有制动时的约1/4。在诸如对开路面制动等工况下,主动转向还可以轻松又有效地抵消由于不平衡制动力所产生的扰动力矩,保证车辆的稳定行驶。由于具有上述优势,主动转向技术成为当前底盘动力学控制发展的热点之一。
常见主动转向系统有主动前轮转向系统AFS和四轮转向系统(也称为主动后轮转向)。主动前轮转向是随着线控转向技术的发展而发展起来的一项技术,并且随着宝马的主动转向系统装配实车而进入实用阶段。由于主动前轮转向与传统车辆的结构能很好兼容,同时对车辆操纵稳定性的提高效果明显,显示出了良好的发展前途,成为转向系统未来发展的主要方向之一。
目前可用于乘用车的主动转向系统主要有两种形式:一种是以宝马和ZF公司联合开发的AFS系统为代表的机械式主动转向系统,通过行星齿轮机械结构增加一个输入自由度以此来实现附加转向,目前已装配于宝马5系的轿车上,以及韩国的MANDO、美国的TRW、日本的JTEKT公司也有类似产品;另一种是线控转向系统(SWB),利用控制器综合驾驶员转向角输入和当时的车辆状态来决定转向电机的输出电流,最终驱动前轮转动。该系统在许多概念车和实验室研究中已广泛采用,如通用公司的Sequel燃料电池概念车就采用了线控转向技术。
线控转向和机械式主动转向系统最大的区别体现在当系统出现故障时,机械式主动转向系统仍能通过转向盘与车轮间的机械连接确保其转向性能,而线控转向一定要通过系统主要零件的冗余设计来保证车辆的安全性。由于上述安全性和可靠性的原因,目前法律上还不允许将线控转向系统直接装备车辆。
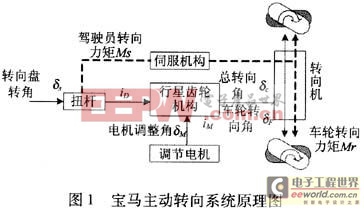
下面以宝马的AFS系统为例,介绍机械式主动转向系统的结构和工作原理。该系统主要由三大子系统组成:液压助力齿轮齿条动力转向系统、变传动比执行系统和电控系统。系统原理图如图1所示。
该系统除传统的转向机械构件外,最重要的包含两大核心部件:一是一套双行星齿轮机构,通过叠加转向实现变传动比功能;二是Sewtronic液力伺服转向系统,用于实现转向助力功能。在驾驶过程中,驾驶员输入的力矩和转角共同传递给扭杆,其中的力矩输入由液力伺服机构依据车速和转向角度进行助力控制,而角输入则通过由伺服电机驱动的双行星齿轮机构与控制器输出的附加转角进行角叠加,经过叠加后的总转向角才是传递给齿轮齿条转向机构的最终转角。其中,控制器输出的转角是根据各个传感器的信号,包括车轮转速、转向角度、偏转率、横向加速度经综合计算得到的。由于宝马主动转向系统不仅仅可以对转向力矩进行调节,而且还可以对转向角度做调整,因而可以使转向输入与当前的车速达到最佳匹配。
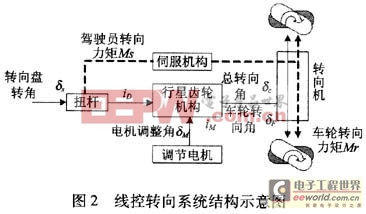
一般来说,线控转向系统由方向盘总成、转向执行总成和主控制器(ECU)3个主要部分以及自动防故障系统、电源等辅助系统组成,系统结构如图2所示。
方向盘总成包括方向盘、方向盘转角传感器、力矩传感器、方向盘回正力矩电机。其基本功能是将驾驶员的转向意图(经过测量方向盘转角)转换成数字信号,并传递给主控制器;同时接受主控制器送来的力矩信号,产生方向盘回正力矩,以提供给司机相应的路感信息。
转向执行总成包括前轮转角传感器、转向执行电机、转向电机控制器和前轮转向组件等。转向执行总成的功能是接受主控制器的命令,通过转向电机控制器控制转向车轮转动,实现驾驶员的转向意图。
主控制器对采集的信号做多元化的分析处理,判别汽车的运动状态,给方向盘回正力电机和转向电机发送指令,控制两个电机的工作,保证各种工况下都具有理想的车辆响应,以减少驾驶员对汽车转向特性随车速变化的补偿任务,减轻驾驶员负担。同时控制器还可以对司机的操作进行判别。
由于线控转向系统结构的特殊性,因而自动防故障系统成为线控转向系统的重要模块,它包括一系列的监控和实施算法,针对不同的故障形式和故障等级做出相应的处理,以求最大限度地保持汽车的正常行驶。
在一般的驾驶操作中,驾驶员要同时完成两个任务:(1)路径跟随;(2)车辆姿态的保持。路径跟随由于涉及到路线的选择和跟随等复杂问题,目前还无法由控制器完全取代驾驶员。相反,因为外界扰动对车辆姿态的影响常常很突然,车辆姿态的控制对司机而言,特别是对新手来说,就很难。而这样的控制由控制器却可完全实现。由于涉及到车辆的姿态控制的动力学参数主要是横摆角速度,因而对横摆角速度的控制也成为主动前轮转向控制最重要的方面。
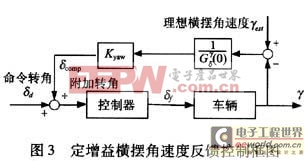
对横摆角速度的控制,常见的方法有3种:(1)横摆角速度反馈控制;(2)鲁棒单向解耦横摆角速度控制;(3)基于扰动观察器的横摆角速度控制。横摆角速度反馈控制的基本思路是利用理想横摆角速度Yest和实际横摆角速度Y之差进行反馈控制。宝马的主动转向系统运用的是横摆角速度反馈控制的方法,其控制器为PI控制。横摆角速度反馈控制不但使横摆角速度响应的带宽增大,而且使横摆角速度阻尼增大,尤其是在车速较高时改善了车辆的操纵稳定性。但也同时存在着降低横摆角速度和侧向加速度的增益,进而使驾驶员中低速时操纵困难。针对上述问题,一般采用定增益形式的横摆角速度反馈控制进行改进,该控制方法可保持车辆横摆角速度增益在反馈控制时不变。图3所示为一定增益横摆角速度反馈控制框图。其中,为车辆在等速圆周运动情况下从前轮转角到横摆角速度的增益,Kyaw为反馈比例系数。
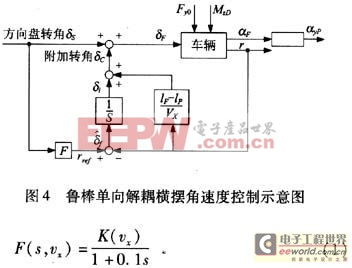
鲁棒单向解耦横摆角速度控制是由德国宇航局的阿克曼教授提出的,在合理分解驾驶员操作任务的基础上,对横摆角速度和侧向加速度单向解耦,进而对横摆角速度进行控制。所谓单向解耦,指的是控制器在对车辆的横摆角速度进行反馈控制时对车辆前桥解耦点的侧向加速度没有影响,而在驾驶员进行侧向运动控制时,可以通过侧向加速度间接影响横摆角速度,保证车辆能顺利过弯,这是该算法的最大特点。由于该算法本身对车辆不确定参数(如:车辆质量分布、车速、轮胎与地面间的附着系数)具有一定的鲁棒性,故而称为鲁棒单向解耦控制。鲁棒单向解耦控制也存在横摆角速度阻尼随车速的增加而下降的问题,可采用预设横摆角速度阻尼的控制方法加以解决。该方法是在单向解耦控制和横摆角速度阻尼之间进行折衷,实现既能在不同车速下保持较好的横摆角速度阻尼特性,又能维持车辆控制对名义模型的横摆角速度单向解耦。图4所示为鲁棒单向解耦横摆角速度控制框图。图中在实际控制时采用的是一个衰退的积分,从而使横摆角速度的控制只在扰动发生1 s内产生作用,帮助驾驶员稳定车辆,1 s以后,车辆将完全在驾驶员的控制之下。参考横摆角速度值由式(1)算出,是一个与速度有关的稳态值。
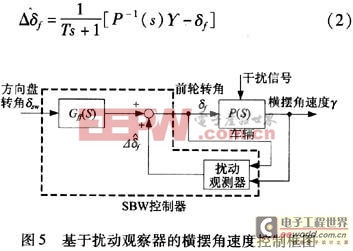
近年来,随着控制技术的发展,一种以往多用于电机控制的扰动观察器控制方法被移植到了车辆横摆角速度控制中。该控制方法的基本原理如图5所示,利用扰动观察器理论建立的反馈补偿器,通过反馈补偿器根据车辆包含扰动的实际横摆角速度生成一个补偿转角,叠加到车辆的输入转角上,从而实现对车辆横摆角速度的控制。反馈补偿器的表达式如下:
从表达式中可以看出,所谓的扰动观察器其实质是利用车辆的反向动力学传递模型,通过车辆的实际横摆角速度来计算车辆的名义前轮转角,进而通过与实际前轮转角求差来得到抵消横摆扰动的转角来进行控制。由于控制过程中横摆角速度信号会遇到噪声信号,故一般扰动观察器都带有一个低通滤波环节。低通滤波环节同时还有改变反向动力学模型分子分母阶次的作用,使其在控制上能轻松实现。基于扰动观察器的横摆角速度控制具有结构简单,含义清晰,对外界扰动和系统参数变化具有较强的鲁棒性特点。理论和实验证明扰动观察器的控制结构更适合进行横摆稳定性控制,成为未来横摆角速度控制发展的一个方向。
D*控制(或称为横摆角速度和侧向加速度的综合控制)源于四轮转向控制中对后轮转向的控制策略,是一种对车辆的横摆角速度和侧向加速度进行综合控制的方法。在该控制中,控制的反馈量不再只有横摆角速度,而是横摆角速度与侧向加速度的线)所示。
式中:Cy为侧向加速度,VY为车速与横摆角速度的乘积,两者量纲一致,从这里可以看出,D*控制是一种侧重于侧向运动控制的操控方法。
上一篇:【48812】方向助力是啥意思?

微信公众号


